 Mientras que Fedora 41, a finales de 2024, aspira a tener más compilaciones de paquetes reproducibles, openSUSE Factory ya ha logrado un hito importante en las compilaciones reproducibles bit a bit.
Mientras que Fedora 41, a finales de 2024, aspira a tener más compilaciones de paquetes reproducibles, openSUSE Factory ya ha logrado un hito importante en las compilaciones reproducibles bit a bit.
- Visto: 65

Mientras que Fedora 41, a finales de 2024, aspira a tener más compilaciones de paquetes reproducibles, openSUSE Factory ya ha logrado un hito importante en las compilaciones reproducibles bit a bit.
 La gestión de datos espaciales es fundamental en numerosas disciplinas, desde la planificación urbana hasta la gestión medioambiental y la agricultura de precisión. En este artículo, exploraremos algunas de las principales herramientas de software libre para la gestión de datos espaciales, ofreciendo alternativas sólidas a ArcGIS.
La gestión de datos espaciales es fundamental en numerosas disciplinas, desde la planificación urbana hasta la gestión medioambiental y la agricultura de precisión. En este artículo, exploraremos algunas de las principales herramientas de software libre para la gestión de datos espaciales, ofreciendo alternativas sólidas a ArcGIS.
 Lo bueno de Linux es que cualquiera puede lanzarse a desarrollar un sistema operativo completo tomando componentes de otros proyectos de código abierto o creándolos desde cero.
Lo bueno de Linux es que cualquiera puede lanzarse a desarrollar un sistema operativo completo tomando componentes de otros proyectos de código abierto o creándolos desde cero.
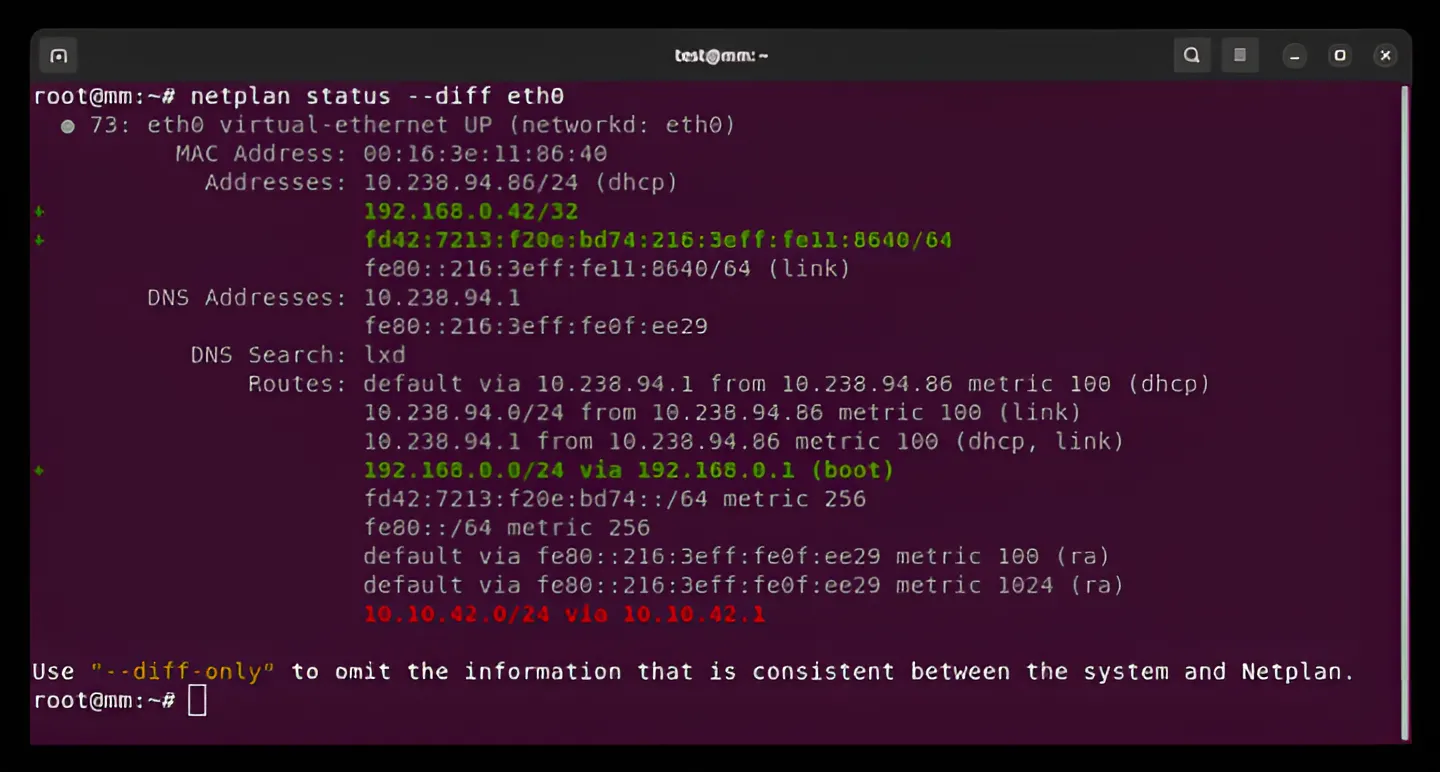 Canonical ha anunciado la liberación general de Netplan 1.0, la primera versión estable de su renderizador de abstracción de configuración de red, tras siete años de desarrollo. Aunque la versión 1.0 es más un hito simbólico que un avance tecnológico significativo, dado que el software ha estado en uso durante algún tiempo y viene preinstalado en Ubuntu, aún así presenta aspectos interesantes.
Canonical ha anunciado la liberación general de Netplan 1.0, la primera versión estable de su renderizador de abstracción de configuración de red, tras siete años de desarrollo. Aunque la versión 1.0 es más un hito simbólico que un avance tecnológico significativo, dado que el software ha estado en uso durante algún tiempo y viene preinstalado en Ubuntu, aún así presenta aspectos interesantes.
 Las contribuciones de código generadas y asistidas por IA ya no están permitidas en la distribución Gentoo Linux.
Las contribuciones de código generadas y asistidas por IA ya no están permitidas en la distribución Gentoo Linux.
 Esta versión también añade la posibilidad de evitar que el módulo del kernel de VirtualBox se cargue automáticamente durante el arranque del sistema.
Esta versión también añade la posibilidad de evitar que el módulo del kernel de VirtualBox se cargue automáticamente durante el arranque del sistema.
 El análisis de datos se ha convertido en un pilar fundamental en diversas áreas, desde la toma de decisiones empresariales hasta la investigación científica. En el ecosistema de Linux, existen numerosas herramientas libres que permiten realizar análisis de datos de manera efectiva y potente.
El análisis de datos se ha convertido en un pilar fundamental en diversas áreas, desde la toma de decisiones empresariales hasta la investigación científica. En el ecosistema de Linux, existen numerosas herramientas libres que permiten realizar análisis de datos de manera efectiva y potente.
 TensorFlow es una de las herramientas más potentes y populares para el desarrollo de aplicaciones de inteligencia artificial, incluyendo tareas de procesamiento de lenguaje natural como la generación de texto predictivo. En este artículo, te guiaré paso a paso en el proceso de desarrollar tu primera aplicación utilizando TensorFlow para generar texto predictivo.
TensorFlow es una de las herramientas más potentes y populares para el desarrollo de aplicaciones de inteligencia artificial, incluyendo tareas de procesamiento de lenguaje natural como la generación de texto predictivo. En este artículo, te guiaré paso a paso en el proceso de desarrollar tu primera aplicación utilizando TensorFlow para generar texto predictivo.
 Utilice el marco INSPIRe para ahorrar tiempo y obtener una ventaja competitiva (ChatGPT-4 - Claude 3 - Gemini)
Utilice el marco INSPIRe para ahorrar tiempo y obtener una ventaja competitiva (ChatGPT-4 - Claude 3 - Gemini)
 Los Entornos de Desarrollo Integrados (IDEs, por sus siglas en inglés) son herramientas esenciales para los programadores de Python, ya que ofrecen una amplia gama de funcionalidades que facilitan la escritura, depuración y gestión de proyectos.
Los Entornos de Desarrollo Integrados (IDEs, por sus siglas en inglés) son herramientas esenciales para los programadores de Python, ya que ofrecen una amplia gama de funcionalidades que facilitan la escritura, depuración y gestión de proyectos.
 Esta versión también actualiza el manejo del microcódigo, establece la distribución del teclado para la instalación mínima y añade udev sync antes de lsblk que sigue al formateo.
Esta versión también actualiza el manejo del microcódigo, establece la distribución del teclado para la instalación mínima y añade udev sync antes de lsblk que sigue al formateo.
 Linus Torvalds, el jefe supremo del núcleo Linux, ha hecho más ambiguo el uso de la sangría en los archivos de configuración del núcleo, intencionadamente para eliminar a los analizadores inferiores.
Linus Torvalds, el jefe supremo del núcleo Linux, ha hecho más ambiguo el uso de la sangría en los archivos de configuración del núcleo, intencionadamente para eliminar a los analizadores inferiores.
 La instalación y configuración de servicios web como Apache y NGINX es fundamental para alojar y gestionar sitios web en entornos Linux. Estos servidores web son ampliamente utilizados debido a su estabilidad, rendimiento y flexibilidad.
La instalación y configuración de servicios web como Apache y NGINX es fundamental para alojar y gestionar sitios web en entornos Linux. Estos servidores web son ampliamente utilizados debido a su estabilidad, rendimiento y flexibilidad.
 Los juegos de azar llevan con nosotros toda la vida. Éstos surgieron hace siglos como una forma de entretenimiento, e incluso en épocas pasadas las personas ya comenzaban a jugarse ciertos objetos para dotar de más emoción a este tipo de juegos.
Los juegos de azar llevan con nosotros toda la vida. Éstos surgieron hace siglos como una forma de entretenimiento, e incluso en épocas pasadas las personas ya comenzaban a jugarse ciertos objetos para dotar de más emoción a este tipo de juegos.
 Las supercomputadoras representan la vanguardia en términos de capacidad de procesamiento y cálculo intensivo. En la actualidad, muchas de estas potentes máquinas están impulsadas por el sistema operativo Linux, destacando el papel fundamental que el software libre juega en la computación de alto rendimiento.
Las supercomputadoras representan la vanguardia en términos de capacidad de procesamiento y cálculo intensivo. En la actualidad, muchas de estas potentes máquinas están impulsadas por el sistema operativo Linux, destacando el papel fundamental que el software libre juega en la computación de alto rendimiento.
 El Festival Latinoamericano de Instalación de Software Libre (Flisol) es mucho más que un evento tecnológico; representa una oportunidad invaluable para promover la cultura del software libre y fortalecer la comunidad tecnológica en Latinoamérica. En este artículo, exploraremos las razones por las cuales es crucial celebrar el Flisol en nuestra región.
El Festival Latinoamericano de Instalación de Software Libre (Flisol) es mucho más que un evento tecnológico; representa una oportunidad invaluable para promover la cultura del software libre y fortalecer la comunidad tecnológica en Latinoamérica. En este artículo, exploraremos las razones por las cuales es crucial celebrar el Flisol en nuestra región.
 El acceso remoto es una función vital en el mundo de la informática, permitiendo administrar y controlar sistemas desde ubicaciones remotas. En este artículo, exploraremos cómo configurar el acceso remoto tanto a través de la consola web como mediante SSH en sistemas Linux.
El acceso remoto es una función vital en el mundo de la informática, permitiendo administrar y controlar sistemas desde ubicaciones remotas. En este artículo, exploraremos cómo configurar el acceso remoto tanto a través de la consola web como mediante SSH en sistemas Linux.
 Raspberry Pi ha revolucionado la forma en que desarrollamos aplicaciones, brindando a los entusiastas y profesionales de la tecnología una plataforma versátil y económica para crear proyectos innovadores. A continuación, exploraremos los pasos clave para desarrollar aplicaciones con Raspberry Pi, desde la configuración inicial hasta la implementación de proyectos avanzados.
Raspberry Pi ha revolucionado la forma en que desarrollamos aplicaciones, brindando a los entusiastas y profesionales de la tecnología una plataforma versátil y económica para crear proyectos innovadores. A continuación, exploraremos los pasos clave para desarrollar aplicaciones con Raspberry Pi, desde la configuración inicial hasta la implementación de proyectos avanzados.
 Desde su fundación, la Fundación Linux ha sido un defensor neutral de Linux y el software de código abierto. Ahora, sin embargo, promueve activamente proyectos de código abierto como OpenTofu y Valkey.
Desde su fundación, la Fundación Linux ha sido un defensor neutral de Linux y el software de código abierto. Ahora, sin embargo, promueve activamente proyectos de código abierto como OpenTofu y Valkey.
 Linux ha ganado popularidad como plataforma de juegos en los últimos años, gracias al crecimiento de la compatibilidad con juegos y el soporte de grandes empresas de la industria del entretenimiento. A continuación presentamos los 10 mejores juegos exclusivos para Linux que ofrecen una experiencia de juego excepcional.
Linux ha ganado popularidad como plataforma de juegos en los últimos años, gracias al crecimiento de la compatibilidad con juegos y el soporte de grandes empresas de la industria del entretenimiento. A continuación presentamos los 10 mejores juegos exclusivos para Linux que ofrecen una experiencia de juego excepcional.
 DNF (Dandified YUM) es el gestor de paquetes de software utilizado en distribuciones basadas en Red Hat, como Fedora, Rocky Linux y Red Hat Enterprise Linux (RHEL). Permite gestionar la instalación, actualización y eliminación de software de manera eficiente. En este artículo, exploraremos cómo se gestiona el software con DNF en Red Hat Linux, incluyendo ejemplos, casos de uso y comandos útiles.
DNF (Dandified YUM) es el gestor de paquetes de software utilizado en distribuciones basadas en Red Hat, como Fedora, Rocky Linux y Red Hat Enterprise Linux (RHEL). Permite gestionar la instalación, actualización y eliminación de software de manera eficiente. En este artículo, exploraremos cómo se gestiona el software con DNF en Red Hat Linux, incluyendo ejemplos, casos de uso y comandos útiles.
 La supervisión y gestión de procesos en un sistema Linux es fundamental para mantener un entorno eficiente y estable. Con una serie de comandos y herramientas integradas en Linux, es posible monitorear, controlar y optimizar los procesos en ejecución. En este artículo, exploraremos cómo realizar estas tareas utilizando comandos, ejemplos prácticos y casos de uso comunes.
La supervisión y gestión de procesos en un sistema Linux es fundamental para mantener un entorno eficiente y estable. Con una serie de comandos y herramientas integradas en Linux, es posible monitorear, controlar y optimizar los procesos en ejecución. En este artículo, exploraremos cómo realizar estas tareas utilizando comandos, ejemplos prácticos y casos de uso comunes.
 TensorFlow es una de las bibliotecas de software más populares para el aprendizaje automático y la inteligencia artificial. Su versatilidad y potencia lo convierten en una herramienta fundamental para desarrolladores y científicos de datos que trabajan en proyectos de aprendizaje automático en Linux. En este artículo, exploraremos la instalación de TensorFlow en sistemas Linux, sus usos comunes y algunos casos de aplicación destacados.
TensorFlow es una de las bibliotecas de software más populares para el aprendizaje automático y la inteligencia artificial. Su versatilidad y potencia lo convierten en una herramienta fundamental para desarrolladores y científicos de datos que trabajan en proyectos de aprendizaje automático en Linux. En este artículo, exploraremos la instalación de TensorFlow en sistemas Linux, sus usos comunes y algunos casos de aplicación destacados.
 Ya se puede descargar la versión beta de Ubuntu 24.04, finalmente Ubuntu 24.04 se convertirá en la próxima versión de soporte a largo plazo (LTS) y esta beta proporcionará a desarrolladores, probadores y entusiastas tiempo para probarla, detectar errores y probar sus nuevas características.
Ya se puede descargar la versión beta de Ubuntu 24.04, finalmente Ubuntu 24.04 se convertirá en la próxima versión de soporte a largo plazo (LTS) y esta beta proporcionará a desarrolladores, probadores y entusiastas tiempo para probarla, detectar errores y probar sus nuevas características.
Encuentra los casinos online confiables en CasinoHEX Chile
Find your favorite csgo gambling sites at bestcsgogambling.com
BeTragaperras " Juega gratis las mejores tragamonedas online españolas"
Niñeras, Empleadas Domésticas, Cuidadoras Infantiles, personal seleccionado en Lima Perú
 La elección del sistema operativo adecuado puede marcar una gran diferencia en la eficiencia, la seguridad y la rentabilidad de una empresa. Linux, con su flexibilidad, estabilidad y variedad de distribuciones especializadas, se ha convertido en una opción popular para muchas empresas, especialmente las pequeñas y medianas empresas (PYMES).
La elección del sistema operativo adecuado puede marcar una gran diferencia en la eficiencia, la seguridad y la rentabilidad de una empresa. Linux, con su flexibilidad, estabilidad y variedad de distribuciones especializadas, se ha convertido en una opción popular para muchas empresas, especialmente las pequeñas y medianas empresas (PYMES).